Para nosotros como humanos, encontrar un objeto perdido entre una pila de cosas, no suele ser una tarea muy difícil. Por ejemplo, si tenemos una cartera perdida entre una pila de ropa, basta con remover las prendas sobrantes hasta encontrar lo buscado.
Para un robot, esta tarea es mucho más compleja, pues implica un razonamiento acabado sobre la pila y los objetos que contiene. No obstante, un equipo de científicos desarrolló un sistema que puede dotar a una máquina de esta capacidad.
Presentan sistema que amplía las capacidades de búsqueda de objetos perdidos en robots
En una investigación previa, científicos del MIT habían conseguido demostrar que mediante el uso brazo robótico que combina información visual y señales de radiofrecuencia, es posible encontrar objetos ocultos, previamente identificados con etiquetas RFID.
Este sistema de etiquetas tiene una adopción cada vez mayor en el comercio minorista, implementado como una alternativa a los códigos de barras, al aprovechar ondas de radiofrecuencias como vía de identificación, en lugar de un indicador únicamente utilizable de manera visual.
A partir de aquel precedente, el equipo de científicos ahora desarrolló un nuevo sistema que puede recuperar de manera eficiente cualquier objeto enterrado en una pila, cuenten con este sistema de etiquetado o no.
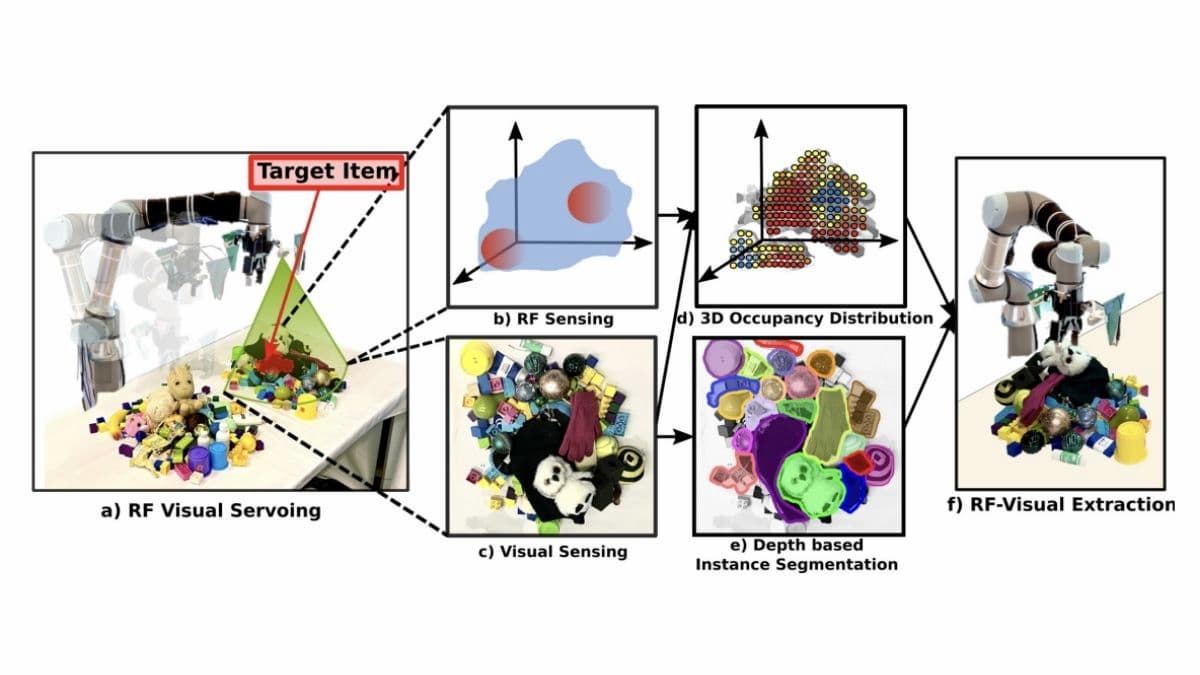
La tecnología desarrollada fue denominada como FuseBot y agrupa un conjunto de algoritmos encargados de razonar sobre la probable ubicación y orientación de los objetos debajo de una pila. Tras realizar su análisis, FuseBot se encarga de buscar la forma más eficiente de remover los objetos que estorban y extraer el elemento objetivo. Este conjunto de algoritmos fue diseñado para implementarse en un brazo robótico dotado de una cámara de vídeo adjunta y una antena de radiofrecuencias.
Para poner a prueba este sistema, asumiendo que el despliegue de las etiquetas RFID aún no es universal, fue propuesta la tarea de recuperar un elemento sin etiquetar de una pila mixta. Inicialmente, el sistema escanea la pila con su cámara para crear un modelo 3D del entorno. Paralelamente, envía señales desde su antena para localizar etiquetas RFID. Estas ondas de radio pueden atravesar la mayoría de las superficies sólidas, permitiéndole al robot “ver” a través de la pila”. Como el artículo de destino no posee etiqueta, FuseBot asume que el artículo no se puede ubicar exactamente en el mismo lugar que una etiqueta RFID.
Tras cada análisis ejecutado sobre la pila durante el proceso, los algoritmos actualizan el modelo 3D del entorno, para resaltar las posibles ubicaciones del objeto buscado. En base a esto, el brazo puede remover gradualmente los obstáculos sobrantes, buscando la vía más eficiente en el menor número de intentos, hasta dar con el ítem perdido.
Al no saber con certeza la orientación de los objetos bajo una pila o cómo podría deformarse este ante la presión de otras cosas encima, los algoritmos utilizan un mecanismo de razonamiento probabilístico, considerando lo que se conoce sobre el tamaño y la forma de un objeto y la ubicación de su etiqueta RFID, para modelar el espacio 3D que probablemente ocupará ese objeto.
Durnate los ensayos ejecutados, FuseBot extrajo con éxito el elemento perdido el 95 % de las veces, en comparación con el 84 % de otro sistema robótico de referencia, catalogado hoy como de última generación. Durante su actividad, el brazo realizó un 40% menos de movimientos y pudo ubicar y recuperar elementos específicos por más del doble de la velocidad considerada como referencia.
Si bien el ejemplo citado es bastante básico, la tecnología desarrollada puede ser muy versátil. Por ejemplo, este sistema podría implementarse en un almacén de comercio electrónico, para gestionar devoluciones o controlar grandes inventarios con una velocidad superior a la que garantiza la supervisión humana.
Fuente info
Autor: Nicolás Verdejo